이번 blog에서는 Atmel SAMA5D3 Xplained board에 LCD를 연결하고, 그 위에서 간단한 Qt application을 돌려 보는 과정을 소개해보고자 한다.
SAMA5D3 Xplained board + Yocto Project + LCD + Qt application
<목차>
1. Yocto project로 Qt를 포함한 부팅 이미지 만들기
2. Host PC에 Qt5 설치하기
3. Target Board에서 Qt application 돌려 보기
4. Qt application을 Yocto Project에 추가하기
2. Host PC에 Qt5 설치하기
3. Target Board에서 Qt application 돌려 보기
4. Qt application을 Yocto Project에 추가하기
1. Yocto Project로 Qt를 포함한 부팅 이미지 만들기
이번 절에서는 Yocto Project를 기준으로 Qt용 demo image를 만드는 절차를 소개해 보도록 하겠다. 먼저 Atmel SAMA5D3 Xplained board용 yocto project build 절차는 이전 blog에 소개된 5절의 내용을 기본적으로 사용하도록 하겠다. 따라서 여기서는 Qt와 관련된 부분만을 별도로 추가해 보기로 하자.
이번 절에서는 Yocto Project를 기준으로 Qt용 demo image를 만드는 절차를 소개해 보도록 하겠다. 먼저 Atmel SAMA5D3 Xplained board용 yocto project build 절차는 이전 blog에 소개된 5절의 내용을 기본적으로 사용하도록 하겠다. 따라서 여기서는 Qt와 관련된 부분만을 별도로 추가해 보기로 하자.
$ cd yocto
$ git clone git://github.com/meta-qt5/meta-qt5.git -b krogoth
=> meta-qt5 source를 내려 받는다.
$ cd poky/build-atmel/conf
$ vi bblayers.conf
=> meta-qt5를 추가한다.
 그림 1.1 conf/bblayers.conf 파일 수정
그림 1.1 conf/bblayers.conf 파일 수정
$ cd ..
$ source oe-init-build-env build-atmel
=> build-atmel을 위한 환경 설정을 한다.
$ bitbake atmel-qt5-demo-image
=> qt5 demo image를 만든다.
=> 실행 결과, Ubuntu 16.04에서는 아래와 같이 qtbase 관련 에러가 발생한다.
 그림 1.2 qtbase 관련 에러 발생
그림 1.2 qtbase 관련 에러 발생
그림 1.2의 내용으로 봐서는, "0001-Fix-building-without-OpenGL-support.patch" 패치 파일에 문제가 있는 듯 보이는데, 일단 (임시적으로) 아래 그림 1.3과 같이 해당 패치가 아예 적용되지 않도록 recipe를 수정해 보기로 한다.
 그림 1.3 meta-atmel/qt5-layer/recipes-qt/qt5/qtbase_%.bbappend 파일 수정
그림 1.3 meta-atmel/qt5-layer/recipes-qt/qt5/qtbase_%.bbappend 파일 수정
수정 후, 다시 build를 계속 진행해 보니, 정상적으로 build가 마무리(tmp/deploy/images/sama5d3-xplained/*) 되었고, NFS booting(자세한 사항은 이전 blog 6절 참조)을 해 보니 아래와 같이 Qt 화면(Atmel demo app)이 정상적으로 출력된다.
 그림 1.4 Qt demo application main 화면
그림 1.4 Qt demo application main 화면
다음으로 Qt application을 build하는데 필요한 cross-compiler toolchain을 준비해 보도록 하자.
$ bitbake -c populate_sdk atmel-qt5-demo-image
=> SDK를 만드는 작업을 한다(시간이 오래 걸림).
=> 이 내용과 관련해서는 이전 blog 1절에서 이미 소개한 바 있음.
$ cd tmp/deploy/sdk
$ ./poky-atmel-glibc-x86_64-atmel-qt5-demo-image-cortexa5hf-vfp-toolchain-2.1.2.sh
=> toolchain을 설치한다.
 그림 1.5 Qt를 위한 yocto toolchain 설치 화면
그림 1.5 Qt를 위한 yocto toolchain 설치 화면
$ . /opt/poky-atmel/2.1.2/environment-setup-cortexa5hf-vfp-poky-linux-gnueabi
=> 설치된 toolchain을 적용한다(실제 cross-compile 작업을 수행하기 직전에 실행해 주어야 함)
=> Qt의 경우는 Qt Creator 설정 메뉴에서 관련 내용을 지정해 줄 것(4절에서 설명할 것임)이므로, 실제로 불필요한 내용으로 볼 수도 있음.
2. Host PC에 Qt5 설치하기
이번 절에서는 Ubuntu 16.04 Linux PC에 Qt5를 설치하는 과정을 소개하고자 한다. 먼저, 아래 site의 내용을 참조하여 linux(64bit)용 qt run file을 download 받는다.
|
V
$ wget http://download.qt-project.org/official_releases/qt/5.6/5.6.1/qt-opensource-linux-x64-5.6.1.run
이후 모드(실행 모드) 전환 후, 아래와 같이 실행하도록 한다.
$ chmod +x qt-opensource-linux-x64-5.6.1.run
$ ./qt-opensource-linux-x64-5.6.1.run
=> 설치를 시작한다(몇번의 click으로 설치 가능함).
 그림 2.1 Qt5 설치 화면
그림 2.1 Qt5 설치 화면
설치가 완료된 후, Qt Creator를 실행해 보면 다음과 같다.
 그림 2.2 Qt Creator 실행 화면
그림 2.2 Qt Creator 실행 화면
(*) 참고: 최신 버젼 Qt5.7.1을 설치했으나, qt Creater의 상단 메뉴 내용이 출력되지 않아, 5.6.2로 다시 설치함. 5.6.2을 선택한 이유는 앞서 yocto에서 사용한 Qt version이 5.6.2이기 때문임.
3. Target Board에서 Qt application 돌려 보기
이번 절에서는 Qt Creator와 Yocto cross toolchain을 이용하여, target board용 application을 생성하는 절차를 소개하고자 한다.
Qt Creator의 환경 설정에 들어가기에 앞서, 지난 1절에서 설치해 둔 yocto toolchain을 이용하여 console 상에서 간단한 Qt application을 만드는 과정을 설명하는 것이 순서일 듯 싶다.
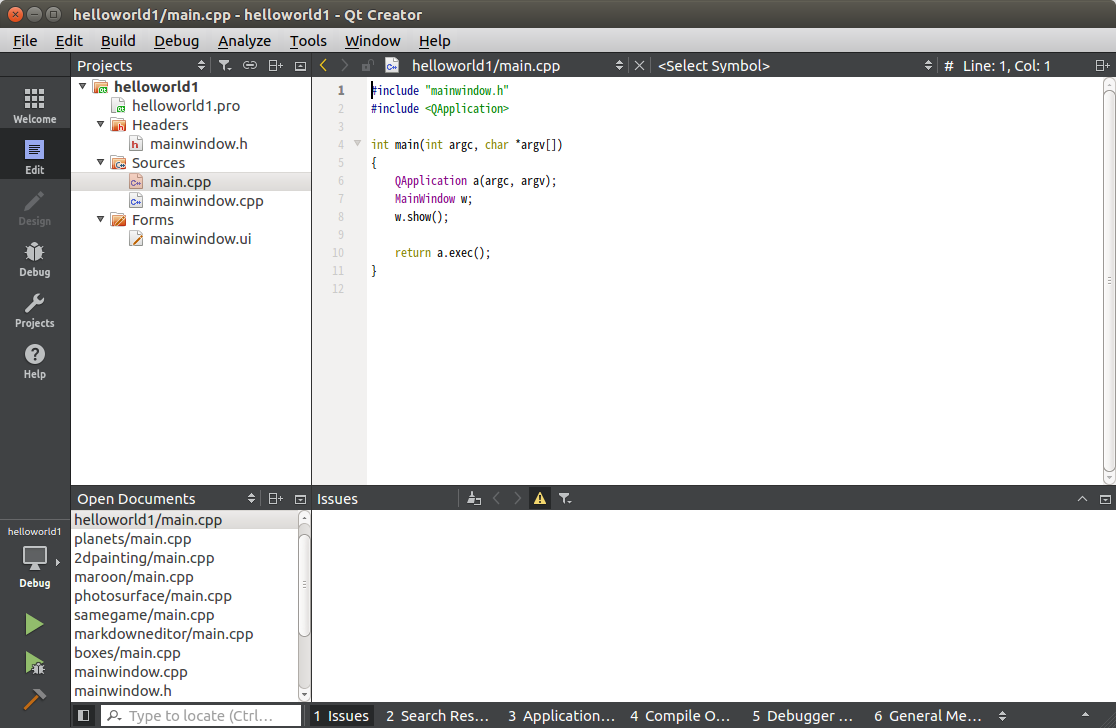
먼저 아래와 같이 hello world program을 작성해 두었다고 가정하자.
 그림 3.1 Qt Creator로 작성한 main.cpp
그림 3.1 Qt Creator로 작성한 main.cpp
$ cd helloworld1/
=> 여기에 main.cpp가 있음.
$ source /opt/poky-atmel/2.1.2/environment-setup-cortexa5hf-vfp-poky-linux-gnueabi
=> cross-compile을 하기 위해, yocto toolchain의 환경을 설정한다.
=> 파일 내용을 보면 알 수 있듯이, 각종 cross compile을 위한 export 명령이 정의되어 있음.
$ qmake -project
=> .pro file을 생성한다.
$ qmake
=> Makefile을 생성한다.
$ make
=> build를 진행한다. 아래와 같은 결과가 출력된다.
$ ls -la
-rw-rw-r-- 1 chyi chyi 40529 1월 5 13:05 Makefile
-rwxrwxr-x 1 chyi chyi 268356 1월 5 13:05 helloworld1
-rw-rw-r-- 1 chyi chyi 286 1월 5 13:05 helloworld1.pro
-rw-rw-r-- 1 chyi chyi 212 1월 5 12:59 main.cpp
-rw-rw-r-- 1 chyi chyi 312796 1월 5 13:05 main.o
$ scp ./helloworld1 root@192.168.1.50:/usr/bin
=> helloworld1 program을 target board(192.168.1.50)로 복사한다.
이후 target board에서 helloworld1를 실행해 보니, 정상 동작한다.
<target board에서 실행>
$ /usr/bin/helloworld1
...
그렇다면, console 대신에, Qt Creator 상에서 직접 target board용 image를 build하고, target board 상에서 동작시키기 위해서는 어떻게 하면 될까 ?
우선 제일 먼저 해야할 작업은, 앞서 준비해 둔 yocto cross toolchain 환경 설정과 관련된 내용을 Qt5/Tools/QtCreator/bin/qtcreator.sh 파일의 맨 앞에 추가해 주는 것이다. 이는 QtCreator를 실행하는 환경 자체를 cross-compile 환경으로 바꾸기 위한 조치로 보면 된다.
source /opt/poky-atmel/2.1.2/environment-setup-cortexa5hf-vfp-poky-linux-gnueabi
 그림 3.2 Tools/QtCreator/bin/qtcreator.sh 수정
그림 3.2 Tools/QtCreator/bin/qtcreator.sh 수정
주의) 반드시 #! /bin/sh 앞 라인에 위의 내용을 추가해 주기 바란다.
그런 다음, 아래와 같이 Qt Creator를 다시 구동시켜 주자.
$ cd ~/Qt5/Tools/QtCreator/
$ bin/qtcreator.sh &
다음으로 (QtCreator 상단의) Tools -> Options 메뉴를 선택한 후, 몇가지 환경 값을 지정해 주어야 하는데, 그 내용을 하나씩 살펴 보도록 하자.
먼저 좌측 Devices 선택 후, 우측의 Add 버튼을 눌러, 새로운 target device(Generic Linux Device 선택해야 함)를 생성해 주도록 하자. 미리 말하지만 이 설정을 추가하는 이유는 target board용으로 build한 application을 scp 등으로 target board에 자동으로 올려 테스트를 하기 위해서이다.
 그림 3.3 Target board 디바이스 생성 화면
그림 3.3 Target board 디바이스 생성 화면
그 다음, 좌측의 Build & Run을 선택한 상태에서, 다시 상단의 Compilers tab을 선택 한 후, Add 버튼(mouse로 Manual 선택 상태에서)을 눌러 yocto cross-compiler의 path를 아랫 값으로 지정해 주도록 한다. 눈치챘겠지만, Qt application을 build할 때 g++이 아니라, arm-poky-linux-gnueabi-g++를 사용하겠다는 것으로 보면 된다.
/opt/poky-atmel/2.1.2/sysroots/x86_64-pokysdk-linux/usr/bin/arm-poky-linux-gnueabi/arm-poky-linux-gnueabi-g++
 그림 3.4 Cross compiler 지정 화면
그림 3.4 Cross compiler 지정 화면
같은 방식으로, 이번에는 Debuggers tab을 선택하여, arm용 cross gdb path를 아래와 같이 입력해 준다.
/opt/poky-atmel/2.1.2/sysroots/x86_64-pokysdk-linux/usr/bin/arm-poky-linux-gnueabi/arm-poky-linux-gnueabi-gdb
 그림 3.5 cross gdb 패스 입력 화면
그림 3.5 cross gdb 패스 입력 화면
다음으로 상단의 Kits tab을 선택하여 sysroot path(target board용 rootfs)를 지정해 준다. 참고로 sysroot 디렉토리 내에는 Qt5를 위한 각종 library(usr/lib/libQt5*)가 존재하는데, 이는 cross-compile 과정(link)에서 사용되게 된다. 따라서 이 path를 제대로 지정하지 않을 경우, 각종 link error에 봉착하게 될 것이다.
/opt/poky-atmel/2.1.2/sysroots/cortexa5hf-vfp-poky-linux-gnueabi
 그림 3.6 sysroot path 지정 화면
그림 3.6 sysroot path 지정 화면
주의) 위의 그림에서 한가지 주의할 점은 Qt mkspec 란에 반드시 linux-oe-g++를 입력해 주어야 한다는 점이다. 이를 누락할 경우, cross-compile시 Qt 관련 error가 발생하게 된다.
마지막으로, Qt Versions tab을 선택한 후 qmake path를 아래와 같이 입력해 준다.
/opt/poky-atmel/2.1.2/sysroots/x86_64-pokysdk-linux/usr/bin/qt5
 그림 3.7 qmake path 지정 화면
그림 3.7 qmake path 지정 화면
이제 Qt Creator 상에서의 cross-compile을 하기 위한 모든 준비가 마무리 되었다. 앞서 만들어 둔, hello world program을 약간 수정(버튼을 하나 추가함) 후, Qt Creator 상에서 build해 보고, build 결과로 생성된 binary file을 target board에 올려 실행해 보도록 하자.
먼저 아래 그림과 같이 helloworld1.pro 파일에 아래 내용을 추가하도록 한다. 이를 추가하는 이유는 target board의 어느 위치로 binary file을 전송(복사)할 지를 결정하기 위해서이다.
TARGET = helloworld1
target.files = hellworld1
target.path = /usr/bin
INSTALLS += target
 그림 3.8 helloworld1.pro file 수정
그림 3.8 helloworld1.pro file 수정
다음으로, helloworld1을 Rebuild해 준다(우측 helloworld1 source tree 위에서 마우스 우 Click -> Rebuild 메뉴 선택).
재 build에 성공했으면, 좌측의 Projects 버튼을 선택한 후, 다시 상단의 Run 메뉴(sama5d3 밑에 있음)를 선택하여 그 아래에 나오는 Run Environment 부분을 아래와 같이 수정해 주도록 한다. 참고로, 현재 build된 yocto qt image는 framebuffer를 기반으로 동작하도록 되어 있다(즉, X11 방식이 아님). 따라서, Qt application이 이 환경에서 제대로 동작하기 위해서는 framebuffer 관련 설정이 추가되어야 한다.
Run Environment
-> Add 버튼 선택
-> Variable: QT_QPA_PLATFORM 입력
-> Value: linuxfb 입력
 그림 3.9 Projects -> Run 설정 변경
그림 3.9 Projects -> Run 설정 변경
아래 그림 3.10은 앞서 helloworld1.pro에 추가한 target 관련 내용이 Run Settings 화면에 반영된 모습이다.
 그림 3.10 Projects -> Run의 내용(Local File Path 및 Remote(=target board) Directory 모습)
그림 3.10 Projects -> Run의 내용(Local File Path 및 Remote(=target board) Directory 모습)
자, 이제 마침내 helloworld1 binary를 target 보드에서 돌려볼 차례가 되었다. Qt Creator의 좌측 Run 버튼을 눌러, 과연 어떤 일이 벌어지는지 살펴 보도록 하자.
결과는 예상대로, helloworld1 program이 target board의 LCD 화면에 출력되고 있다. Console 상에서도 ps 명령을 통해 확인(그림 4.12)해 보니, /usr/bin/helloworld1이 구동되고 있음을 알 수 있다.
 그림 3.11 helloworld1 app을 target board에서 실행한 화면
그림 3.11 helloworld1 app을 target board에서 실행한 화면
 그림 3.12 console 상에서 ps 명령 실행 결과
그림 3.12 console 상에서 ps 명령 실행 결과
참고) 현재 framebuffer에 출력된 내용을 깨끗이 지우고자 할 때는 아래 명령을 사용하면 된다.
# cat /dev/zero > /dev/fb0
4. Qt application을 Yocto Project에 추가하기
이번 절에서는 3절에서 만든 Qt application을 Yocto project에 추가하는 방법을 소개해 보고자 한다.
$ cd yocto/meta-atmel/recipes-test
=> 이 디렉토리 아래에 qt application을 추가하기로 함(반드시 이 디렉토리일 필요는 없음).
$ mkdir qthello
$ vi qthello_1.0.bb
=> qthello package에 대한 recipe 파일을 만든다.
 그림 4.1 qthello_1.0.bb 파일
그림 4.1 qthello_1.0.bb 파일
$ mkdir qthello-1.0; cd qthello-1.0
=> source code가 위치할 디렉토리를 만들고, 그곳으로 이동한다.
$ vi qthello.pro
=> qmake project file을 하나 만든다.
 그림 4.2 qthello.pro 파일
그림 4.2 qthello.pro 파일
$ vi qthello.cpp
=> qthello.cpp file을 하나 만든다.
 그림 4.3 qthello.cpp 파일
그림 4.3 qthello.cpp 파일
$ cd ~/poky/build-atmel
$ bitbake qthello
=> 앞서 작성한 recipe 및 source code에 하자가 없는지, qthello package만 build해 본다.
$ vi conf/local.conf
=> qthello package를 rootfs image에 포함시키기 위해 local.conf를 수정한다.
 그림 4.4 conf/local.conf에 qthello 패키지 추가
그림 4.4 conf/local.conf에 qthello 패키지 추가
$ bitbake atmel-qt5-demo-image
=> 전체 image를 다시 build하도록 한다.
이제 NFS booting을 시도한 후, qthello application을 수동으로 돌려 보도록 하자.
<Target board>
# export QT_QPA_PLATFORM=linuxfb
=> framebuffer로 직접 display할 내용을 write하고자 할 때 사용함(linuxfb plugin 지정)
# export QT_QPA_GENERIC_PLUGINS=evdevmouse,evdevtouch:/dev/input/touchscreen0,evdevkeyboard:/dev/input/event0
=> input 장치(touch, keyboard, mouse)에 대한 plugin 설정
# /usr/bin/qthello
 그림 4.5 qthello 실행 결과(글씨가 안보임)
그림 4.5 qthello 실행 결과(글씨가 안보임)
참고) 위의 방법 대신, "/usr/bin/qthello -platform linuxfb" 형태로 실행해 주어도 된다.
이상으로 SAMA5D3 Xplained board에 yocto image를 올리고, 여기에 간단한 Qt application을 추가해 보는 과정을 간략히 소개해 보았다.
오늘은 Qt blog의 첫번째 시간으로 my KernelHacks blog에 게재했던 내용을 옮겨 보았으나, 다음 시간 부터는 (blog의 목적에 맞게) Qt programming의 기초 부터 하나씩 하나씩 내용 정리를 시작해 볼 계획이다.
References
1. Application Development with Qt Creator, Ray Rischpater, PACKT publishing.
2. Game Programming Using Qt, Witold Wysota/Lorenz Haas, PACKT publishing.
3. Embedded Linux Projects Using Yocto Project Cookbook, Alex Gonzalez, PACKT publishing.
4. https://github.com/gumstix/yocto-manifest/wiki/Cross-Compile-with-QtCreator
5. http://www.jumpnowtek.com/rpi/Qt-Creator-Setup-for-RPi-cross-development.html
Slowboot
$ git clone git://github.com/meta-qt5/meta-qt5.git -b krogoth
=> meta-qt5 source를 내려 받는다.
$ cd poky/build-atmel/conf
$ vi bblayers.conf
=> meta-qt5를 추가한다.

그림 1.1 conf/bblayers.conf 파일 수정
$ cd ..
=> build-atmel을 위한 환경 설정을 한다.
$ bitbake atmel-qt5-demo-image
=> qt5 demo image를 만든다.
=> 실행 결과, Ubuntu 16.04에서는 아래와 같이 qtbase 관련 에러가 발생한다.

그림 1.2 qtbase 관련 에러 발생
그림 1.2의 내용으로 봐서는, "0001-Fix-building-without-OpenGL-support.patch" 패치 파일에 문제가 있는 듯 보이는데, 일단 (임시적으로) 아래 그림 1.3과 같이 해당 패치가 아예 적용되지 않도록 recipe를 수정해 보기로 한다.

그림 1.3 meta-atmel/qt5-layer/recipes-qt/qt5/qtbase_%.bbappend 파일 수정
수정 후, 다시 build를 계속 진행해 보니, 정상적으로 build가 마무리(tmp/deploy/images/sama5d3-xplained/*) 되었고, NFS booting(자세한 사항은 이전 blog 6절 참조)을 해 보니 아래와 같이 Qt 화면(Atmel demo app)이 정상적으로 출력된다.

그림 1.4 Qt demo application main 화면
다음으로 Qt application을 build하는데 필요한 cross-compiler toolchain을 준비해 보도록 하자.
$ bitbake -c populate_sdk atmel-qt5-demo-image
=> SDK를 만드는 작업을 한다(시간이 오래 걸림).
=> 이 내용과 관련해서는 이전 blog 1절에서 이미 소개한 바 있음.
$ cd tmp/deploy/sdk
$ ./poky-atmel-glibc-x86_64-atmel-qt5-demo-image-cortexa5hf-vfp-toolchain-2.1.2.sh
=> toolchain을 설치한다.

그림 1.5 Qt를 위한 yocto toolchain 설치 화면
$ . /opt/poky-atmel/2.1.2/environment-setup-cortexa5hf-vfp-poky-linux-gnueabi
=> 설치된 toolchain을 적용한다(실제 cross-compile 작업을 수행하기 직전에 실행해 주어야 함)
=> Qt의 경우는 Qt Creator 설정 메뉴에서 관련 내용을 지정해 줄 것(4절에서 설명할 것임)이므로, 실제로 불필요한 내용으로 볼 수도 있음.
|
V
$ wget http://download.qt-project.org/official_releases/qt/5.6/5.6.1/qt-opensource-linux-x64-5.6.1.run
이후 모드(실행 모드) 전환 후, 아래와 같이 실행하도록 한다.
$ chmod +x qt-opensource-linux-x64-5.6.1.run
$ ./qt-opensource-linux-x64-5.6.1.run

그림 2.1 Qt5 설치 화면

(*) 참고: 최신 버젼 Qt5.7.1을 설치했으나, qt Creater의 상단 메뉴 내용이 출력되지 않아, 5.6.2로 다시 설치함. 5.6.2을 선택한 이유는 앞서 yocto에서 사용한 Qt version이 5.6.2이기 때문임.
=> 여기에 main.cpp가 있음.
이후 target board에서 helloworld1를 실행해 보니, 정상 동작한다.



같은 방식으로, 이번에는 Debuggers tab을 선택하여, arm용 cross gdb path를 아래와 같이 입력해 준다.
/opt/poky-atmel/2.1.2/sysroots/x86_64-pokysdk-linux/usr/bin/arm-poky-linux-gnueabi/arm-poky-linux-gnueabi-gdb



TARGET = helloworld1





참고) 현재 framebuffer에 출력된 내용을 깨끗이 지우고자 할 때는 아래 명령을 사용하면 된다.
# cat /dev/zero > /dev/fb0
4. Qt application을 Yocto Project에 추가하기
이번 절에서는 3절에서 만든 Qt application을 Yocto project에 추가하는 방법을 소개해 보고자 한다.
$ cd yocto/meta-atmel/recipes-test
=> 이 디렉토리 아래에 qt application을 추가하기로 함(반드시 이 디렉토리일 필요는 없음).
$ mkdir qthello
$ vi qthello_1.0.bb
=> qthello package에 대한 recipe 파일을 만든다.

그림 4.1 qthello_1.0.bb 파일
$ mkdir qthello-1.0; cd qthello-1.0
=> source code가 위치할 디렉토리를 만들고, 그곳으로 이동한다.
$ vi qthello.pro
=> qmake project file을 하나 만든다.
그림 4.2 qthello.pro 파일
=> qthello.cpp file을 하나 만든다.

그림 4.3 qthello.cpp 파일
$ cd ~/poky/build-atmel
$ bitbake qthello
=> 앞서 작성한 recipe 및 source code에 하자가 없는지, qthello package만 build해 본다.
$ vi conf/local.conf
=> qthello package를 rootfs image에 포함시키기 위해 local.conf를 수정한다.

그림 4.4 conf/local.conf에 qthello 패키지 추가
$ bitbake atmel-qt5-demo-image
=> 전체 image를 다시 build하도록 한다.
이제 NFS booting을 시도한 후, qthello application을 수동으로 돌려 보도록 하자.
<Target board>
# export QT_QPA_PLATFORM=linuxfb
=> framebuffer로 직접 display할 내용을 write하고자 할 때 사용함(linuxfb plugin 지정)
# export QT_QPA_GENERIC_PLUGINS=evdevmouse,evdevtouch:/dev/input/touchscreen0,evdevkeyboard:/dev/input/event0
=> input 장치(touch, keyboard, mouse)에 대한 plugin 설정
# /usr/bin/qthello

그림 4.5 qthello 실행 결과(글씨가 안보임)
참고) 위의 방법 대신, "/usr/bin/qthello -platform linuxfb" 형태로 실행해 주어도 된다.
이상으로 SAMA5D3 Xplained board에 yocto image를 올리고, 여기에 간단한 Qt application을 추가해 보는 과정을 간략히 소개해 보았다.
2. Game Programming Using Qt, Witold Wysota/Lorenz Haas, PACKT publishing.
미래에서 왔는데 "좋아요"버튼이 없는게 아쉽네요
답글삭제